ai-robot-DING-XINGYI
四足机器人入门
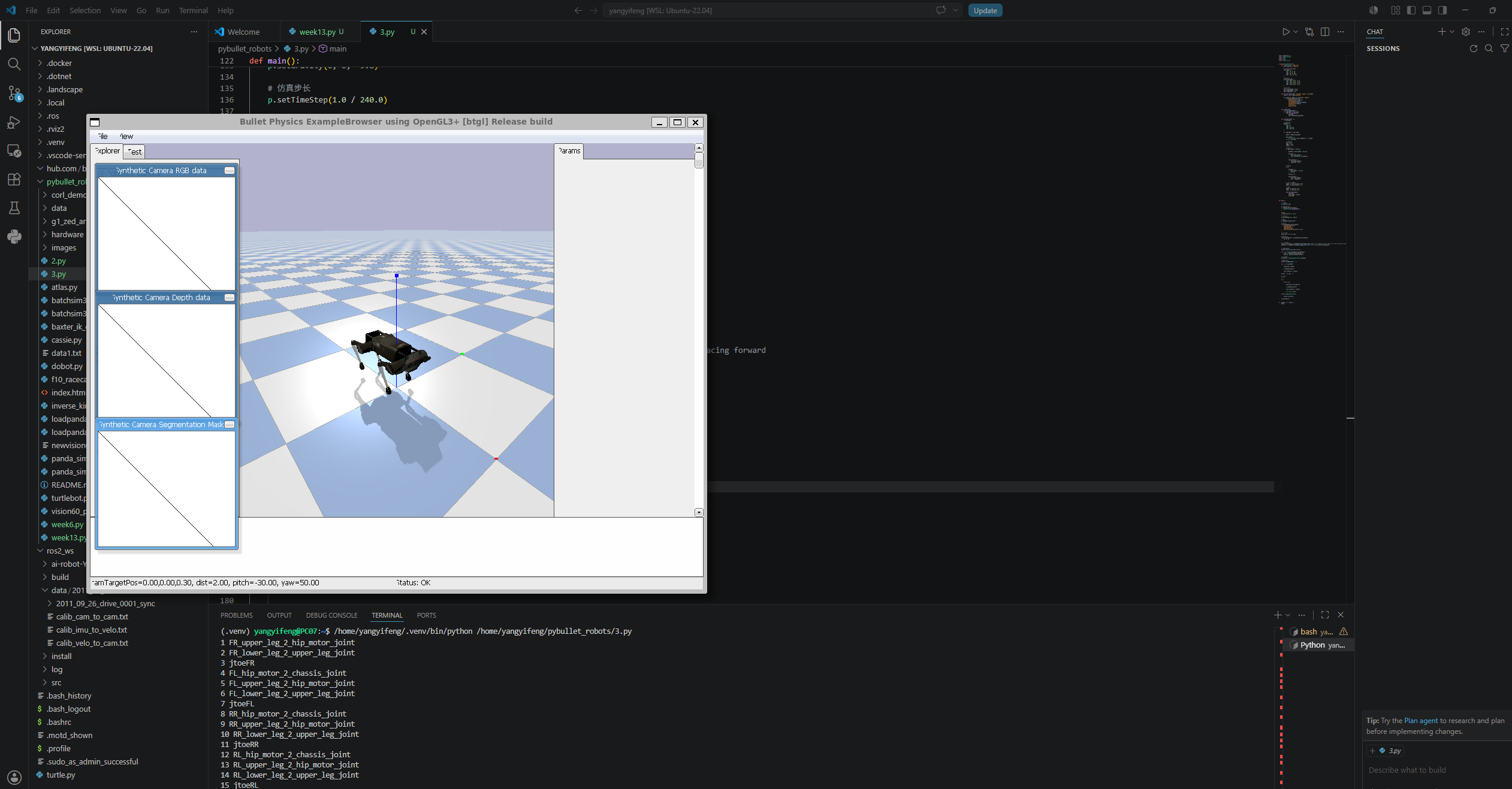
- Trot步态实现
- 修复了机器狗方向错误(最重要)
原始代码:
start_orientation = p.getQuaternionFromEuler( [math.pi / 2, 0, math.pi / 2] )
修改后:
start_orientation = p.getQuaternionFromEuler( [0, 0, 0] )
作用:
修复机器人横着加载的问题 修复一启动就翻倒 修复身体方向错误 修复无法正常前进 - 修改了关节编号
原始代码:
self.leg_joints = { ‘LF’: [0,1,2], ‘RF’: [3,4,5], ‘LH’: [6,7,8], ‘RH’: [9,10,11] }
修改后:
self.legs = { “FL”: [0,1,2], “FR”: [4,5,6], “RL”: [8,9,10], “RR”: [12,13,14] }
作用:
修复控制错误关节 修复腿乱动 修复某些腿不受控制 因为 Laikago 的关节编号本来就不是连续的。
- 修复了机器狗方向错误(最重要)
- 增加了稳定站立姿态
新增:
self.stand_pose = {
“FL”: [0.0, 0.67, -1.3],
…
}
以及:
controller.stand()
作用:
机器人先站稳 防止一启动摔倒 给行走做准备
原始代码没有“站立阶段”。
- 力矩大幅增强
原始代码:
force=20
修改后:
force=500
作用:
原来力太小撑不起身体 现在腿能真正支撑机器人
这是最关键修改之一。
- 新增最大速度限制
新增:
maxVelocity=5
作用:
防止关节瞬间抽搐
行走更加平滑
提高稳定性
- 重写了步态算法
原始代码:
thigh = np.arctan2(x, target_height) calf = -2 * thigh
修改后:
upper += -foot_forward * 0.8 lower += foot_forward * 1.2
作用:
不再使用错误简化逆运动学
改成更加稳定的步态控制
腿运动更加自然
- 新增抬腿动作
新增:
upper -= foot_up * 0.5 lower += foot_up * 0.8
作用:
机器人真正抬腿
防止拖地
行走更自然
- 新增对角步态(Trot)
新增:
phases = {
“FL”: 0,
“RR”: 0,
“FR”: math.pi,
“RL”: math.pi
}
作用:
前左 + 后右同步 前右 + 后左同步 更符合真实四足机器人
原始代码虽然有相位,但实现不完整。
- 新增摄像机控制
新增:
p.resetDebugVisualizerCamera(…)
作用:
自动对准机器人
更容易观察运动
- 新增关节信息打印
新增:
print(i, info[1].decode(“utf-8”))
作用:
调试方便
能查看真实关节编号
- 修改了机器人高度
原始:
[0,0,0.5]
修改后:
[0,0,0.48]
后面又建议:
[0,0,0.55]
作用:
防止腿插地
提高稳定性
- 新增 stand() 函数
新增:
def stand(self):
作用:
独立控制站立
结构更清晰
更容易后续扩展
- 代码结构优化
原始代码:
controller.step()
修改后:
controller.stand() controller.trot_gait()
作用:
逻辑更清晰
更符合真实机器人控制流程