ai-robot-DING-XINGYI
Week2:ROS2基本命令介绍和通信机制基础
下载Ubuntu22.04
安装ROS2
sudo apt update
sudo apt install ros-humble-desktop
2.2.5 验证ROS2安装
实验内容:
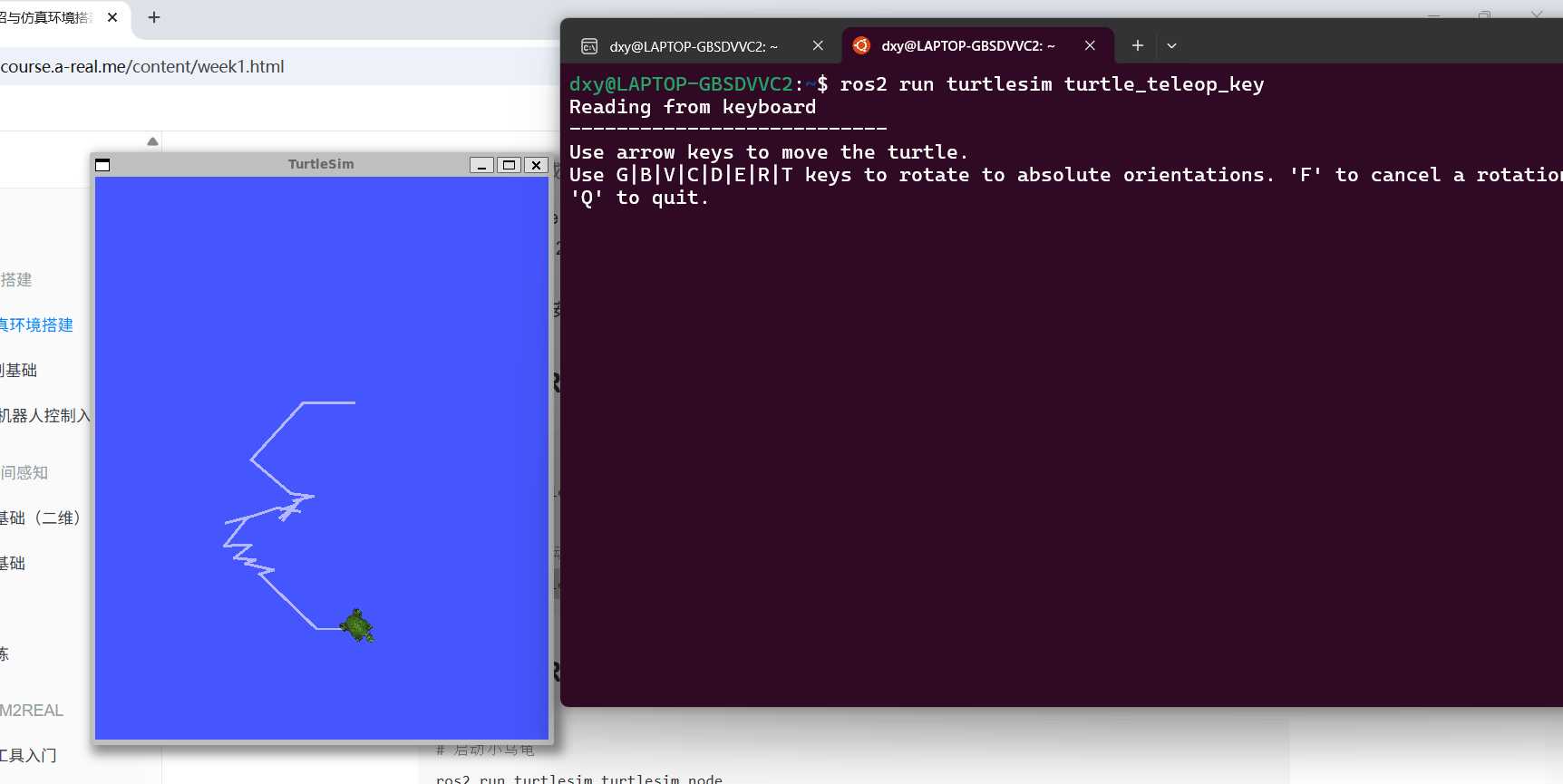
本周学习了 ROS2 的基本命令,并使用 turtlesim 小乌龟完成简单运动控制实验。openclaw与飞书连接
实验命令
启动环境:
source /opt/ros/rolling/setup.bash
启动小乌龟:
ros2 run turtlesim turtlesim_node
查看节点:
ros2 node list
查看话题:
ros2 topic list
监听位置:
ros2 topic echo /turtle1/pose
画圆:
ros2 topic pub –rate 10 /turtle1/cmd_vel geometry_msgs/msg/Twist “{linear: {x: 2.0}, angular: {z: 1.0}}”