ai-robot-DING-XINGYI
ROS2基本命令
查看节点
列出所有运行中的节点
ros2 node list
查看节点信息
ros2 node info /节点名称
示例:
$ ros2 node list
/turtlesim
/teleop_turtle
运行节点
运行一个包中的节点
ros2 run <包名> <节点名>
示例:运行小乌龟
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
查看话题
列出所有话题
ros2 topic list
查看话题信息
ros2 topic info /话题名称
查看话题消息类型
ros2 topic type /话题名称 发布话题
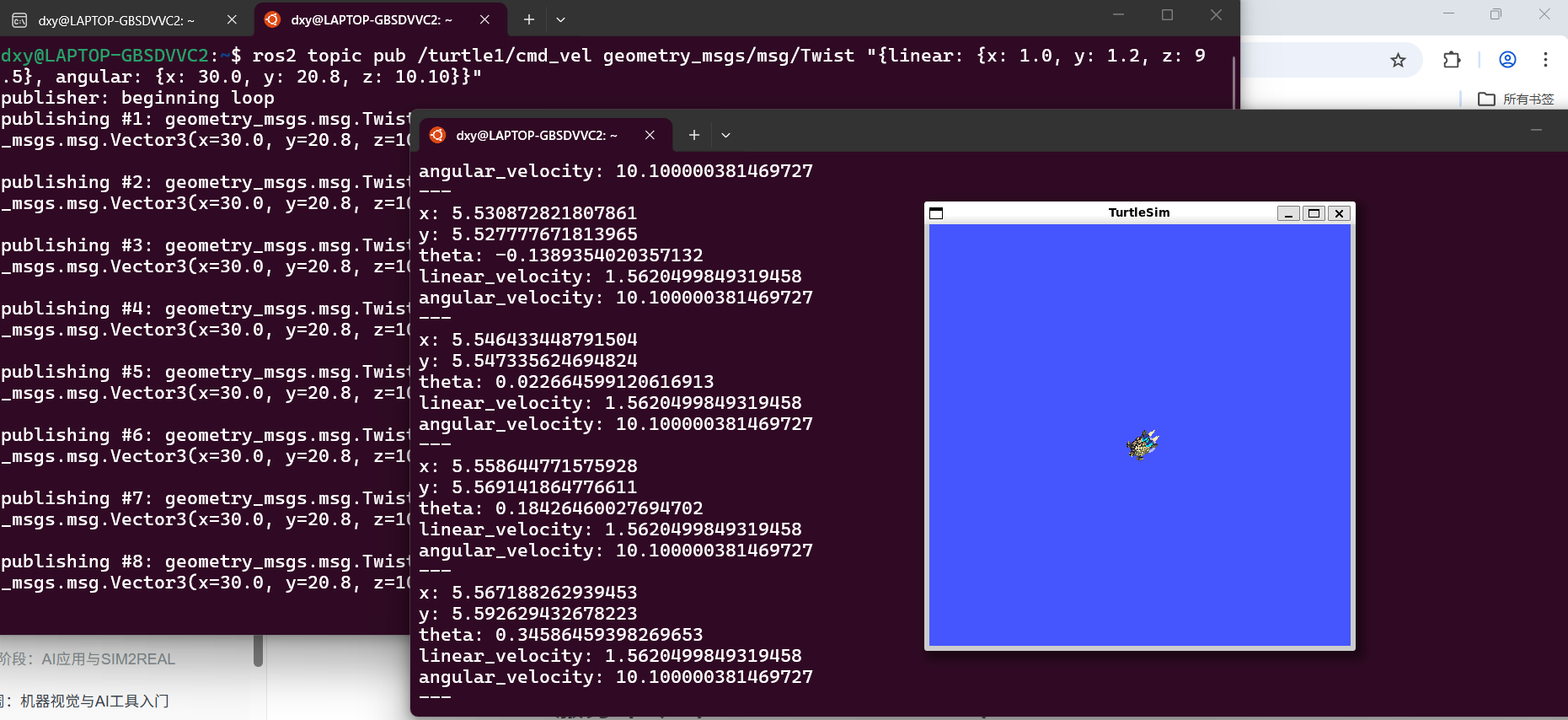
发布消息到话题
ros2 topic pub <话题名> <消息类型> "<数据>"
示例:让小乌龟前进
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist “{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}”
监听话题
监听话题消息
ros2 topic echo <话题名>
示例:监听小乌龟位置
ros2 topic echo /turtle1/pose