ai-robot-DING-XINGYI
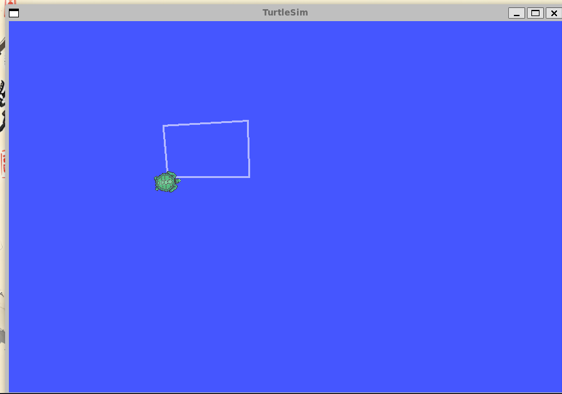
小乌龟走正方形原理
#!/usr/bin/env python3 “”” 让小乌龟走正方形的控制脚本 “””
import rclpy from rclpy.node import Node from geometry_msgs.msg import Twist import time
class SquareMover(Node): “"”走正方形的控制节点”””
机器狗放倒
python安装和python程序的命令行执行
sudo apt install python
cd 程序所在目录
python3 程序名字.py (有时候需要用python)
python 的包管理器 pip (有时候需要使用pip3) 安装
sudo apt install python3-pip
pip3 install pybullet 安装仿真用的物理引擎库
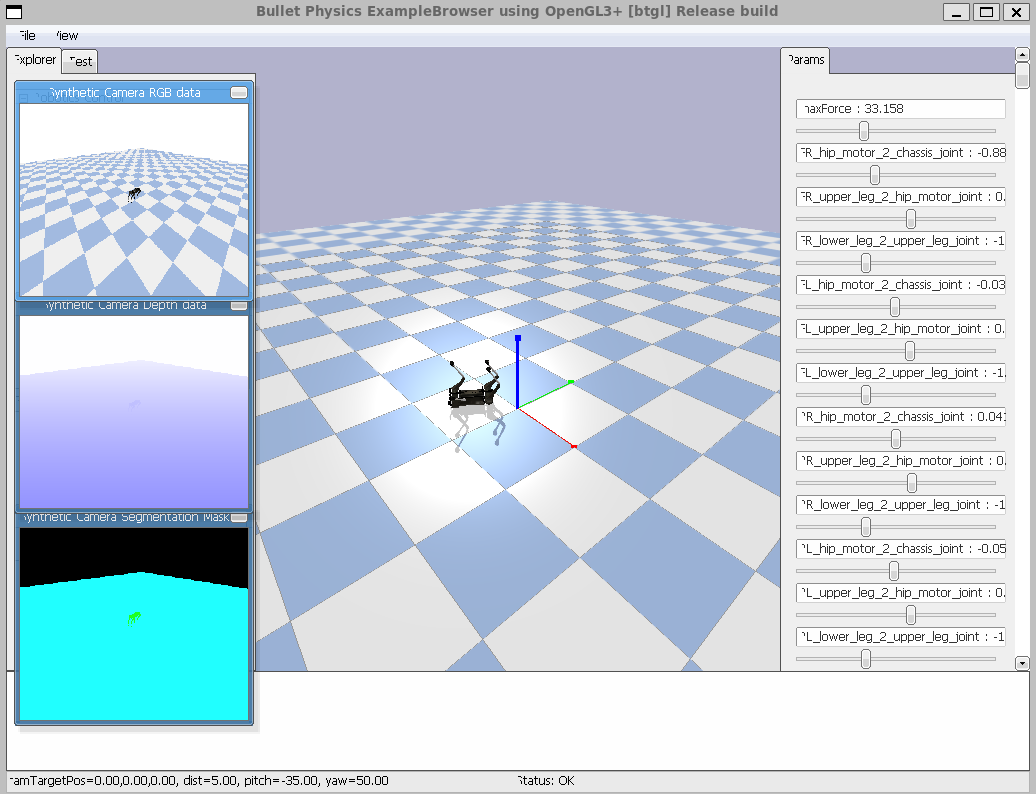
运行机器狗仿真程序
#git clone https://github.com/bulletphysics/pybullet_robots
#python3 lakago.py
运行程序,改关节参数,放(倒)狗(子)